
I am a first year Ph.D. student of RoboLAND in USC supervised by Prof.Feifei Qian.
About Me
I am a first year Ph.D. student of RoboLAND in USC supervised by Prof.Feifei Qian.
- Name: Henry Liu
- Email: shipengl@usc.edu
Research Interests
%
Robotics Locomotion
%
Decision Making/Assisting Human
%
Reinforcement Learning
%
Complex Environment Interacting
Papers
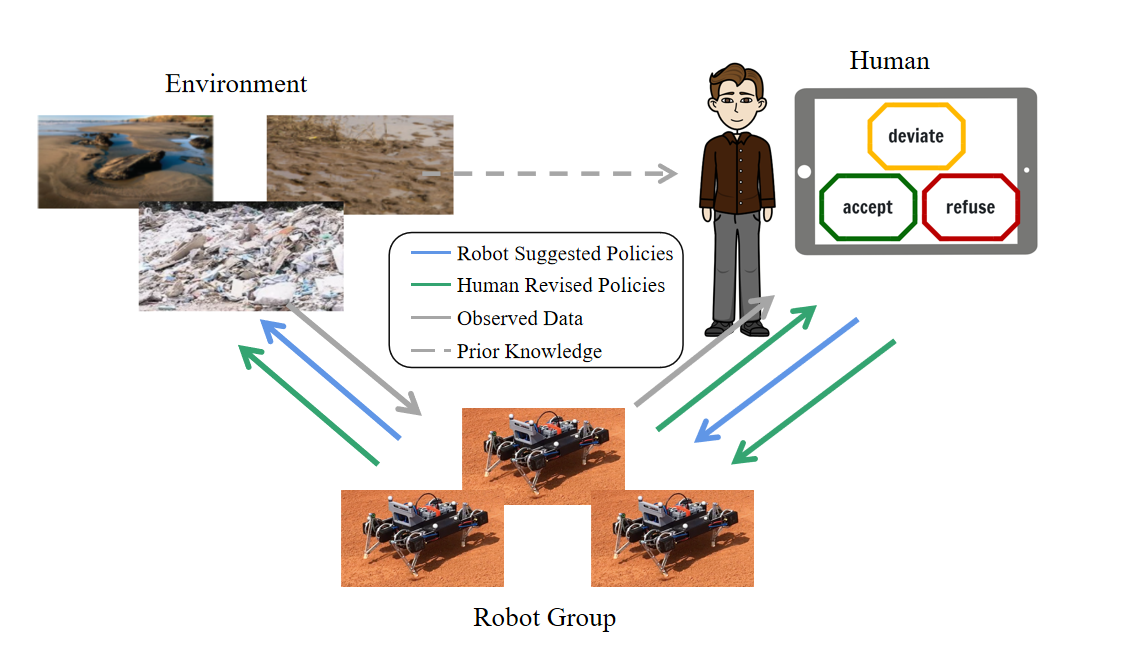
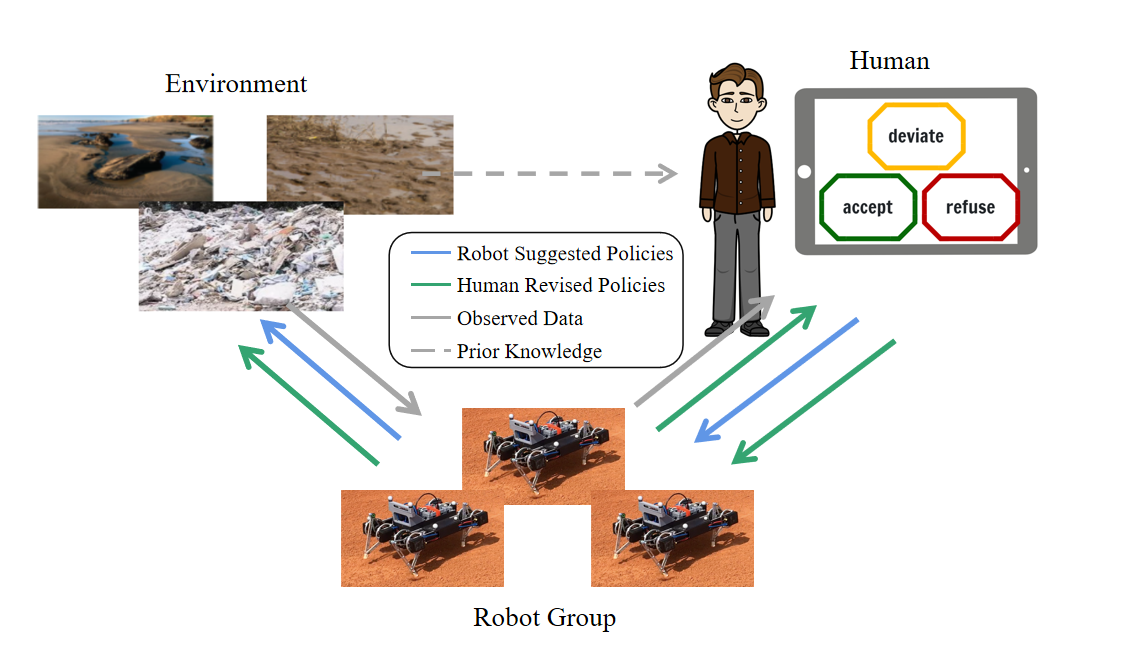
Understanding Human Decision Making in Robot-Assisted Field Data Collection
Shipeng Liu, Cristina Wilson, Thomas Shipley, Daniel Koditschek, Feifei Qian[AGU2022]
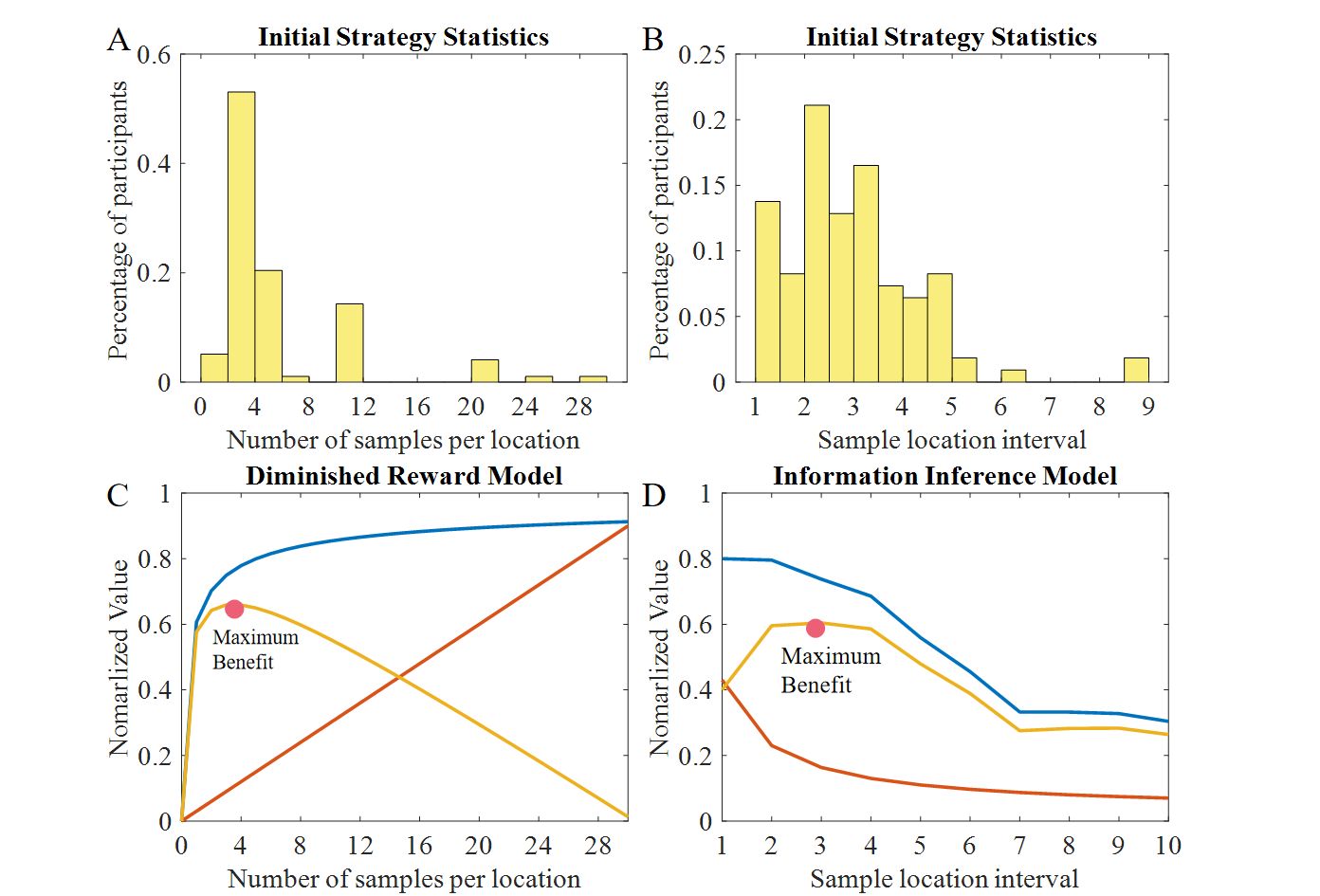
Human Geoscientist Objective Functions for Robot-Aided Field Data Collection Decisions
Shipeng Liu, Cristina G. Wilson, Bhaskar Krishnamachari and Feifei Qian[ICRA 2022]
News
excited to collaborate on Robotics, Legged Robots, Decision Making, and Reinforcement Learning!
2021.10.05 / Los Angeles
Abstract about human-robot decision making was accepted by AGU2021!
2021.08.23 / Los Angeles
We arrived Los Angeles!
Current Projects
Collaborate
Keep In Touch
- 3740 McClintock Avenue
Los Angeles - shipengl@usc.edu
shipeng_liu@hotmail.com